Подгонка наибольшего круга в свободной области на изображении с распределенной частицей
Я работаю над изображениями для обнаружения и установки максимально возможного круга в любой свободной области изображения, содержащего распределенные частицы: 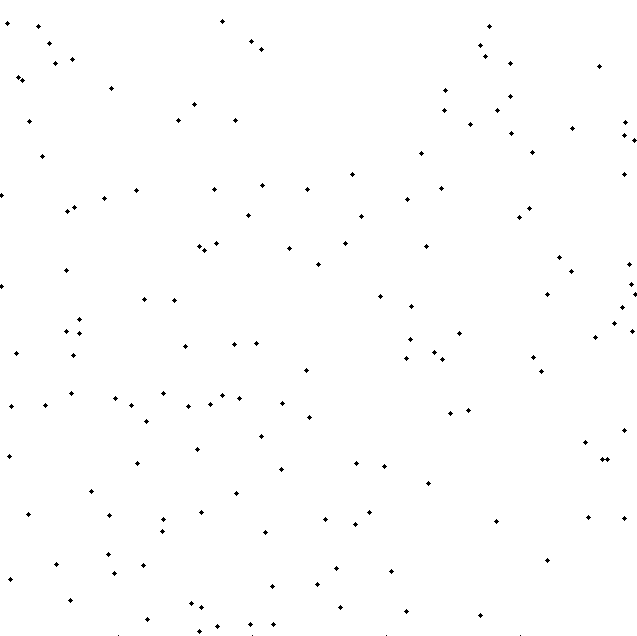
(способный обнаруживать местоположение частицы).
Одно направление - определить круг, касающийся любой трехточечной комбинации, проверяя, свободен ли круг, а затем нахожу самый большой круг среди всех пустых кругов. Однако это приводит к огромному количеству комбинаций, т.е. C(n,3), где n - общее количество частиц в изображении.
Я был бы признателен, если кто-нибудь может предоставить мне какой-либо намек или альтернативный метод, который я могу исследовать.
5 ответов
Давайте сделаем некоторые математики моим другом, так как математика всегда будет до конца!
Википедия:
В математике диаграмма Вороного представляет собой разбиение плоскости на области на основе расстояния до точек в определенном подмножестве плоскости.
Например:
rng(1)
x=rand(1,100)*5;
y=rand(1,100)*5;
voronoi(x,y);
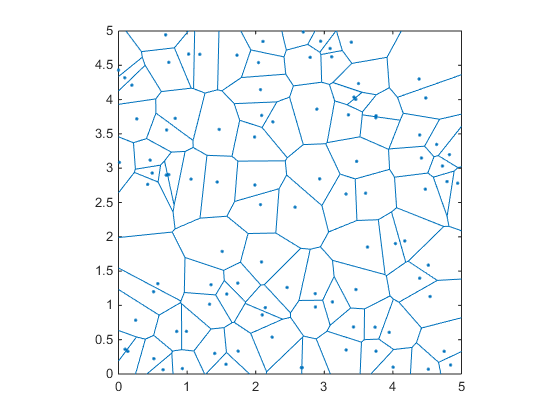
Самое приятное в этой диаграмме заключается в том, что если вы заметите, все ребра/вершины этих синих областей будут равны расстоянию до точек вокруг них. Таким образом, если мы знаем расположение вершин и вычисляем расстояния до ближайших точек, то мы можем выбрать вершину с наибольшим расстоянием как наш центр круга.
Интересно отметить, что края областей Вороного также определяются как окружности треугольников, порожденных триангуляцией Делоне.
Поэтому, если мы вычислим триангуляцию Деланея области и их окружения
dt=delaunayTriangulation([x;y].');
cc=circumcenter(dt); %voronoi edges
И вычислите расстояния между центрами и любой из точек, которые определяют каждый треугольник:
for ii=1:size(cc,1)
if cc(ii,1)>0 && cc(ii,1)<5 && cc(ii,2)>0 && cc(ii,2)<5
point=dt.Points(dt.ConnectivityList(ii,1),:); %the first one, or any other (they are the same distance)
distance(ii)=sqrt((cc(ii,1)-point(1)).^2+(cc(ii,2)-point(2)).^2);
end
end
Тогда мы имеем центр (cc) и радиус (distance) всех возможных кругов, которые не имеют точки внутри них. Нам просто нужен самый большой!
[r,ind]=max(distance); %Tada!
Теперь давайте график
hold on
ang=0:0.01:2*pi;
xp=r*cos(ang);
yp=r*sin(ang);
point=cc(ind,:);
voronoi(x,y)
triplot(dt,'color','r','linestyle',':')
plot(point(1)+xp,point(2)+yp,'k');
plot(point(1),point(2),'g.','markersize',20);
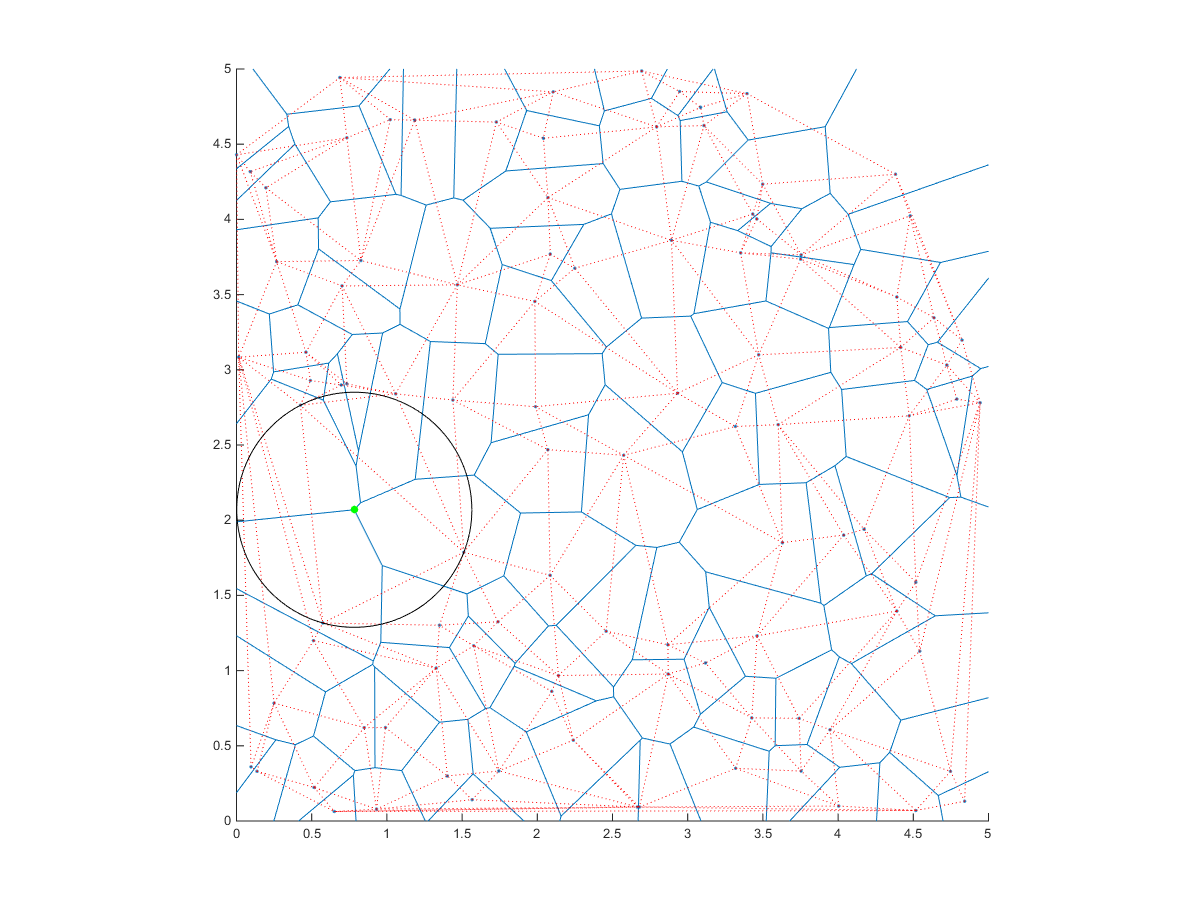
Обратите внимание, как центр круга находится на одной вершине диаграммы Вороного.
ПРИМЕЧАНИЕ: это обнаружит центр внутри [0-5], [0-5]. вы можете легко изменить его, чтобы изменить это ограничение. Вы также можете попытаться найти круг, который полностью соответствует интересующей области (в отличие от центра). Для этого потребуется небольшое добавление в конце, где будет получен максимум.
-
0Довольно особенный ответ, хорошая работа, Андер. Один вопрос: вы используете функцию
delaunayTriangulation... это пользовательская функция? Почему бы не использовать встроенный Matlab вdelaunay? -
0@Wolfie Это не пользовательская функция!
Я хотел бы предложить другое решение на основе поиска сетки с уточнением. Это не так продвинуто, как Ander, или так короче, как rahnema1, но это должно быть очень легко следовать и понимать. Кроме того, он работает довольно быстро.
Алгоритм содержит несколько этапов:
- Мы генерируем равномерно распределенную сетку.
- Мы находим минимальные расстояния точек в сетке ко всем предоставленным точкам.
- Отбрасываем все точки, расстояния которых ниже определенного процентиля (например, 95-го).
- Мы выбираем область, которая содержит наибольшее расстояние (это должно содержать правильный центр, если моя начальная сетка достаточно тонкая).
- Мы создаем новый мешгрид вокруг выбранной области и снова находим расстояния (эта часть явно неоптимальна, поскольку расстояния вычисляются по всем точкам, включая далеко идущие и нерелевантные).
- Мы повторяем уточнение в пределах области, при этом следим за изменением 5% -ных значений → если он опускается ниже некоторого заданного порога, который мы сломаем.
Несколько примечаний:
- Я сделал предположение, что круги не могут выходить за пределы разбросанных точек (т.е. ограничивающий квадрат рассеяния действует как "невидимая стена" ).
- Соответствующий процентиль зависит от того, насколько хороша начальная сетка. Это также повлияет на количество итераций
whileи оптимальное начальное значение дляcnt.
function [xBest,yBest,R] = q42806059
rng(1)
x=rand(1,100)*5;
y=rand(1,100)*5;
%% Find the approximate region(s) where there exists a point farthest from all the rest:
xExtent = linspace(min(x),max(x),numel(x));
yExtent = linspace(min(y),max(y),numel(y)).';
% Create a grid:
[XX,YY] = meshgrid(xExtent,yExtent);
% Compute pairwise distance from grid points to free points:
D = reshape(min(pdist2([XX(:),YY(:)],[x(:),y(:)]),[],2),size(XX));
% Intermediate plot:
% figure(); plot(x,y,'.k'); hold on; contour(XX,YY,D); axis square; grid on;
% Remove irrelevant candidates:
D(D<prctile(D(:),95)) = NaN;
D(D > xExtent | D > yExtent | D > yExtent(end)-yExtent | D > xExtent(end)-xExtent) = NaN;
%% Keep only the region with the largest distance
L = bwlabel(~isnan(D));
[~,I] = max(table2array(regionprops('table',L,D,'MaxIntensity')));
D(L~=I) = NaN;
% surf(XX,YY,D,'EdgeColor','interp','FaceColor','interp');
%% Iterate until sufficient precision:
xExtent = xExtent(~isnan(min(D,[],1,'omitnan')));
yExtent = yExtent(~isnan(min(D,[],2,'omitnan')));
cnt = 1; % increase or decrease according to the nature of the problem
while true
% Same ideas as above, so no explanations:
xExtent = linspace(xExtent(1),xExtent(end),20);
yExtent = linspace(yExtent(1),yExtent(end),20).';
[XX,YY] = meshgrid(xExtent,yExtent);
D = reshape(min(pdist2([XX(:),YY(:)],[x(:),y(:)]),[],2),size(XX));
D(D<prctile(D(:),95)) = NaN;
I = find(D == max(D(:)));
xBest = XX(I);
yBest = YY(I);
if nanvar(D(:)) < 1E-10 || cnt == 10
R = D(I);
break
end
xExtent = (1+[-1 +1]*10^-cnt)*xBest;
yExtent = (1+[-1 +1]*10^-cnt)*yBest;
cnt = cnt+1;
end
% Finally:
% rectangle('Position',[xBest-R,yBest-R,2*R,2*R],'Curvature',[1 1],'EdgeColor','r');
Результатом, который я получаю для данных примера Ander, является [x,y,r] = [0.7832, 2.0694, 0.7815] (что то же самое). Время выполнения составляет около половины решения Ander.
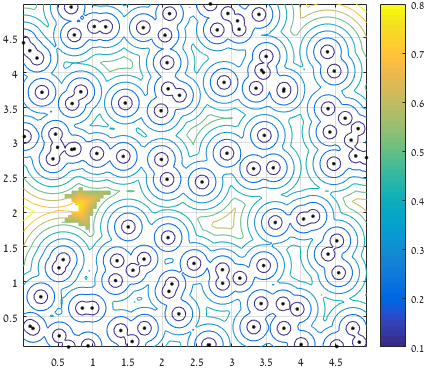
Вот промежуточные графики:
Контур наибольшего (прозрачного) расстояния от точки до множества всех предоставленных точек:
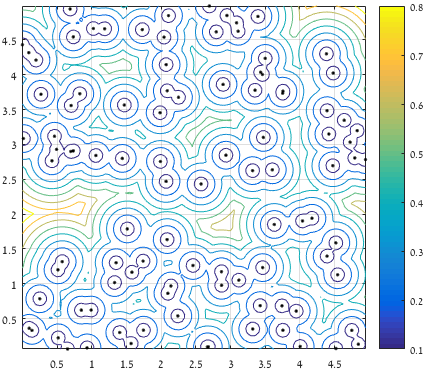
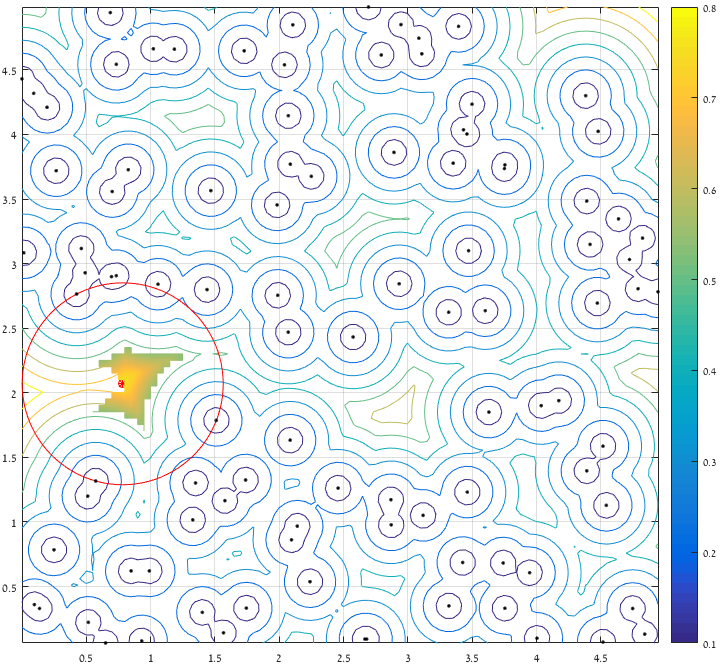
После рассмотрения расстояния от границы, сохраняя только верхние 5% удаленных точек и рассматривая только область, которая содержит наибольшее расстояние (кусок поверхности представляет сохраненные значения):
И наконец:
-
2эх, твои сюжеты милее моих!
-
1@AnderBiguri Нет, не волнуйся ... просто посмотри версию до редактирования :)
Тот факт, что эта проблема может быть решена с помощью "прямого поиска" (как можно видеть в другом ответе), означает, что можно рассматривать это как глобальная оптимизация. Существуют различные способы решения таких проблем, каждый из которых подходит для определенных сценариев. Из моего личного любопытства я решил решить эту проблему с помощью генетического алгоритма.
Вообще говоря, такой алгоритм требует, чтобы мы рассматривали решение как набор "генов", подверженных "эволюции" при определенной "функции пригодности". Как это бывает, довольно легко определить гены и функцию фитнеса в этой проблеме:
- Гены:
x,y,r. - Функция фитнеса: технически максимальная площадь круга, но это эквивалентно максимальному
r(или минимальному-r, поскольку алгоритм требует минимизации функции). - Особое ограничение - если
rбольше, чем евклидово расстояние до ближайшей из предоставленных точек (т.е. круг содержит точку), организм "умирает".
Ниже приведена базовая реализация такого алгоритма ( "базовая", потому что она полностью неоптимизирована, и в этой задаче есть много возможностей для оптимизации no pun).
function [x,y,r] = q42806059b(cloudOfPoints)
% Problem setup
if nargin == 0
rng(1)
cloudOfPoints = rand(100,2)*5; % equivalent to Ander initialization.
end
%{
figure(); plot(cloudOfPoints(:,1),cloudOfPoints(:,2),'.w'); hold on; axis square;
set(gca,'Color','k'); plot(0.7832,2.0694,'ro'); plot(0.7832,2.0694,'r*');
%}
nVariables = 3;
options = optimoptions(@ga,'UseVectorized',true,'CreationFcn',@gacreationuniform,...
'PopulationSize',1000);
S = max(cloudOfPoints,[],1); L = min(cloudOfPoints,[],1); % Find geometric bounds:
% In R2017a: use [S,L] = bounds(cloudOfPoints,1);
% Here we also define distance-from-boundary constraints.
g = ga(@(g)vectorized_fitness(g,cloudOfPoints,[L;S]), nVariables,...
[],[], [],[], [L 0],[S min(S-L)], [], options);
x = g(1); y = g(2); r = g(3);
%{
plot(x,y,'ro'); plot(x,y,'r*');
rectangle('Position',[x-r,y-r,2*r,2*r],'Curvature',[1 1],'EdgeColor','r');
%}
function f = vectorized_fitness(genes,pts,extent)
% genes = [x,y,r]
% extent = [Xmin Ymin; Xmax Ymax]
% f, the fitness, is the largest radius.
f = min(pdist2(genes(:,1:2), pts, 'euclidean'), [], 2);
% Instant death if circle contains a point:
f( f < genes(:,3) ) = Inf;
% Instant death if circle is too close to boundary:
f( any( genes(:,3) > genes(:,1:2) - extent(1,:) | ...
genes(:,3) > extent(2,:) - genes(:,1:2), 2) ) = Inf;
% Note: this condition may possibly be specified using the A,b inputs of ga().
f(isfinite(f)) = -genes(isfinite(f),3);
%DEBUG:
%{
scatter(genes(:,1),genes(:,2),10 ,[0, .447, .741] ,'o'); % All
z = ~isfinite(f); scatter(genes(z,1),genes(z,2),30,'r','x'); % Killed
z = isfinite(f); scatter(genes(z,1),genes(z,2),30,'g','h'); % Surviving
[~,I] = sort(f); scatter(genes(I(1:5),1),genes(I(1:5),2),30,'y','p'); % Elite
%}
И здесь график "временного прохода" из 47 поколений типичного запуска:
(Там, где синие точки являются текущим поколением, красные кресты являются "убитыми инста" организмами, зеленые гексаграммы являются "не-insta-убитыми" организмами, а красный круг обозначает назначение).
-
3Хотя этот подход кажется читателю просто упражнением (то есть, вероятно, лучше использовать других, в том числе и ваш), чувак, это так круто! Это GIF: P
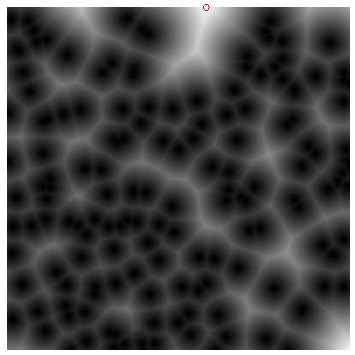
Вы можете использовать bwdist из Image Processing Toolbox для вычисления преобразования расстояния изображения. Это можно рассматривать как метод создания диаграммы ворона, хорошо объясненный в ответе @AnderBiguri.
img = imread('AbmxL.jpg');
%convert the image to a binary image
points = img(:,:,3)<200;
%compute the distance transform of the binary image
dist = bwdist(points);
%find the circle that has maximum radius
radius = max(dist(:));
%find position of the circle
[x y] = find(dist == radius);
imshow(dist,[]);
hold on
plot(y,x,'ro');
-
1Вы должны использовать те же данные, что и я, чтобы мы могли лучше сравнить! Результаты
bwdistвыглядят очень трогательно -
4Вы знаете, что можете использовать URL с
imread, верно? то есть это работает:img = imread('https://i.stack.imgur.com/AbmxL.jpg');
Я не привык к обработке изображений, поэтому это просто идея:
Реализуйте что-то вроде gaussian filter (blur), который преобразует каждую частицу (пиксели) в округлый градиент с r = image_size (все они перекрываются). Таким образом, вы должны получить изображение, где лучшие белые пиксели должны быть лучшими результатами. К сожалению, демонстрация в gimp не удалась, потому что крайняя размытость заставила точки исчезнуть.
В качестве альтернативы вы можете увеличивать все существующие пиксели, помещая все соседние пиксели в области (пример: r = 4), причем левые пиксели будут одинаковыми (те, у которых наибольшее расстояние до любого пикселя)
-
1Это хорошее начало, но в итоге обработка изображения имеет ограничение по размеру в пикселях. Всегда будет минимальная ошибка 1 * размер пикселя
-
2Во всяком случае, этот подход не сопоставим (= далеко за пределами) того, что @AnderBiguri ответил :-P
Ещё вопросы
- 0PHP 1x, в то время как 2x for loop сильно замедляет загрузку
- 0Как получить содержимое элемента, включая слушателей
- 1Спи в случае ошибки, питон
- 1Как исключить слова, которые имеют не алфавитные символы из строки
- 0Попытка заставить curl работать в c ++ linux и GDB
- 1Атрибуты класса, определенные в __init __ (), против атрибутов, определенных методом класса
- 0Несколько раскрывающихся не работает в HTML
- 0выбрать все товары из дочерних категорий в родительской категории
- 0PHP в JavaScript с помощью кнопки «Отправить»
- 1Почему вызовы вызванных методов не обрабатывают все исключения как необработанные исключения в .Net 4.0+?
- 0Variable + Wildcard удаление изображения
- 1A * с осознанием врага
- 0для моего проекта C ++ я создал подпапку в eclipse, как включить ее в основную?
- 0Обновление mongodb из php формы
- 0Функция, которая возвращает массив, но также принимает функцию в качестве параметра
- 0Библиотека разметки каскадных сеток
- 1Векторизация панд с функцией на частях колонны
- 1Больше информации об ошибке + более длинная программа или меньше информации об ошибке + более короткая программа?
- 1ImportError: нет модуля с именем textract
- 0jQuery, функция вызывается без параметров, но есть параметры
- 1Конструктор объекта указывает на исходный конструктор, а не на prototype.constructor после переопределения прототипа функции конструктора.
- 0Я использую угловой фильтр «Дата», но что это за числовое выражение?
- 0<div> Относительное позиционирование
- 1не удается разрешить getSupportFragmentManager () в вспомогательном классе
- 0AngularJS - объект не передан в модальный диалог
- 0Как разместить или попасть в контроллер MVC?
- 0Чтение проблем с двоичными данными
- 0Хотите показать все значения данных в своей группе с заголовком в CGridview в yii
- 0Добавление числа из переменной к свойству объекта
- 1Десериализация Gson - вложенные классы, отображающие строчные поля
- 1регулярное выражение совпадение строки с шаблоном
- 1Android, как я могу выбрать изображение с камеры или галереи одновременно с одним намерением
- 1Angular UrlResolver не переопределяется пользовательским провайдером
- 0слишком много места между строками в таблице
- 1Как перебрать список по два в Python 3? [Дубликат]
- 1Получить содержимое с помощью двух меток с помощью Casperjs
- 0анимация ngAnimate не отображается
- 1Поле со списком asp.net mvc
- 1RxJS подписка никогда не заканчивается
- 0Как создать пользовательский тип данных уровня байтов?
- 1Извлечение Unicode-смайликов в список, Python 3.x
- 0Входные данные не отображаются в php out
- 1Почему деление исключений во время компиляции на ноль не производит в Eclipse IDE?
- 0Данные JSON не загружаются в Angular JS
- 1Touchable не работает с позицией: абсолют
- 0Письма к числам с C ++ символами
- 0Как отредактировать значение 3 метки после нажатия на HREF с Javascript?
- 0Экспресс не получает данные от angularjs
- 1короткие клавиши для меню не работает в wpf в призме
- 1XElement анализирует мой XML-файл как один огромный элемент, как мне это исправить?

nчастицами внутри, иначе самый большой круг этоr=Inf. Или вы имеете в виду самый большой круг, содержащий максимумnчастиц?